Visual
Computing
Computing
ACM Transactions on Graphics 36(4) (SIGGRAPH 2017)
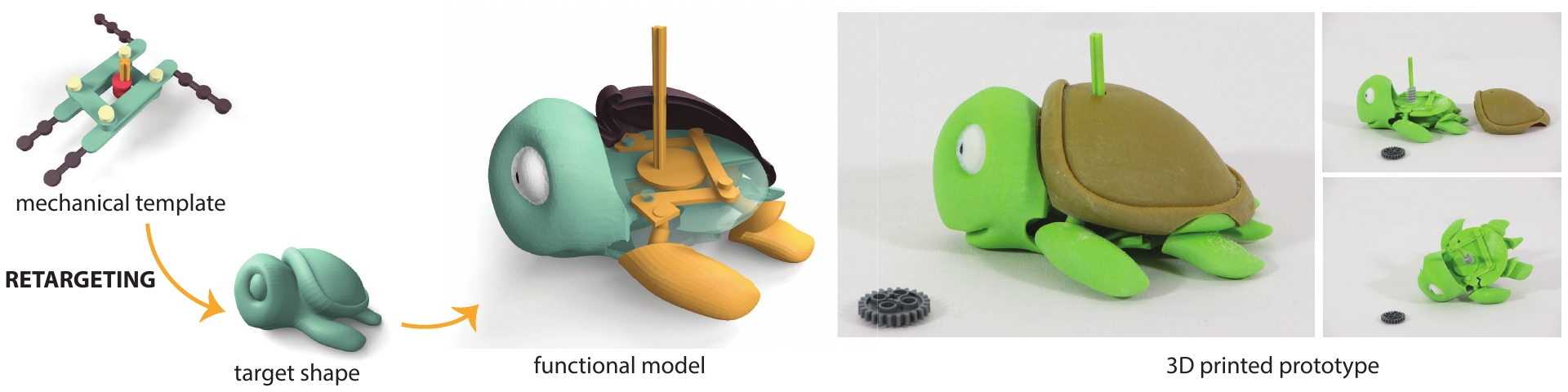
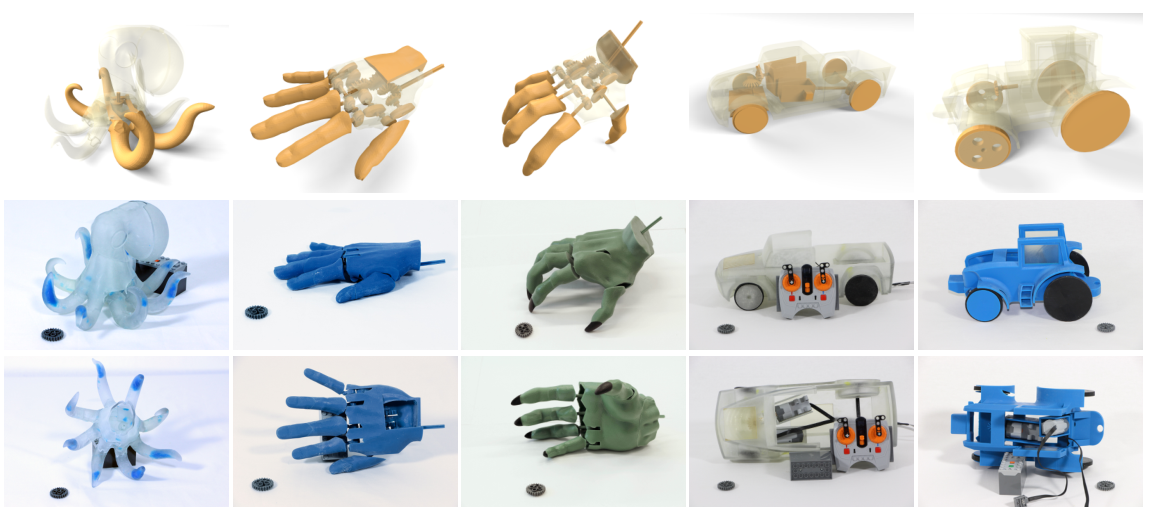
We present an interactive design system to create functional mechanical objects. Our computational approach allows novice users to retarget an existing mechanical template to a user-specified input shape. Our proposed representation for a mechanical template encodes a parameterized mechanism, mechanical constraints that ensure a physically valid configuration, spatial relationships of mechanical parts to the user-provided shape, and functional constraints that specify an intended functionality. We provide an intuitive interface and optimization-in-the-loop approach for finding a valid configuration of the mechanism and the shape to ensure that higher-level functional goals are met. Our algorithm interactively optimizes the mechanism while the user manipulates the placement of mechanical components and the shape. Our system allows users to efficiently explore various design choices and to synthesize customized mechanical objects that can be fabricated with rapid prototyping technologies. We demonstrate the efficacy of our approach by retargeting various mechanical templates to different shapes and fabricating the resulting functional mechanical objects.
@article{Zhang2017,
author = {Zhang, Ran and Auzinger, Thomas and Ceylan, Duygu and Li, Wilmot and Bickel, Bernd},
title = {Functionality-aware Retargeting of Mechanisms to 3D Shapes},
journal = {ACM Transactions on Graphics (SIGGRAPH 2017)},
year = {2017},
volume = {36},
number = {4}
}
We would like to thank everyone who contributed to this paper, especially the artists Abbas Saleh, Daniel Bösze, and David Ronnes for participating in our user study and allowing us to use their models created during the user study; furthermore we thank the authors of the remaining models for sharing them on Thingiverse as Rubber Duck (by Willie, CC0 1.0), Monster Mama (by mcallaghan95, CC BY-NC 3.0), Devilman Hand (by Renato T., CC BY-SA 3.0), B-17 Bomber (by Ethan F. at the Mastics-Moriches-Shirley Community Library’s Teen 3D Print Club, CC BY-SA 3.0), Snap Together Farm Tractor (by Jon Stephenson, CC BY-NC 3.0), chinnook helicopter (by Paul Johnson, CC BY-NC-SA 3.0), and Pickup Truck (by Kalvin Daniels, CC BY-NC-SA 3.0), as well as on the McGill 3D Shape Benchmark [Siddiqi et al. 2008] as teddy10. We also want to express our gratitude to all proof-readers and anonymous reviewers. This project has received funding from the European Union’s Horizon 2020 research and innovation program under the Marie Sklodowska-Curie grant agreement No 642841 and under the European Research Council (ERC) grant agreement No 715767.