Visual
Computing
Computing
IEEE Transactions on Visualization and Computer Graphics 27(6)
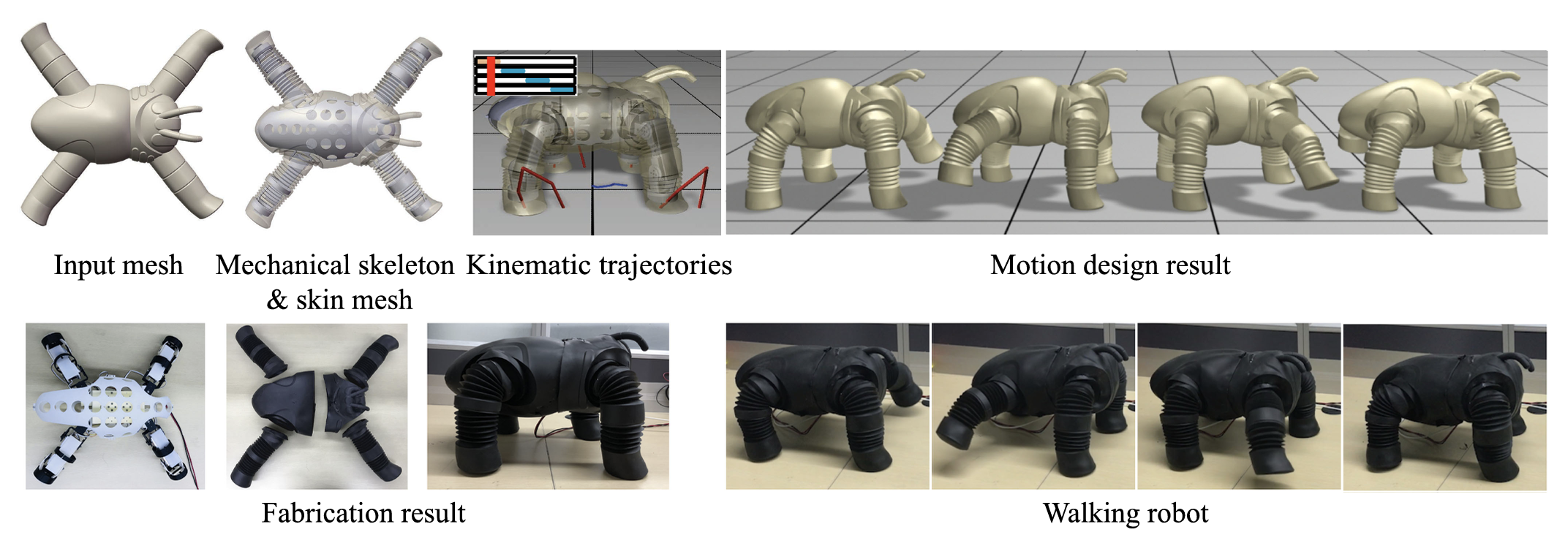
We present a computational design system that assists users to model, optimize, and fabricate quad-robots with soft skins.Our system addresses the challenging task of predicting their physical behavior by fully integrating the multibody dynamics of the mechanical skeleton and the elastic behavior of the soft skin. The developed motion control strategy uses an alternating optimization scheme to avoid expensive full space time-optimization, interleaving space-time optimization for the skeleton and frame-by-frame optimization for the full dynamics. The output are motor torques to drive the robot to achieve a user prescribed motion trajectory.We also provide a collection of convenient engineering tools and empirical manufacturing guidance to support the fabrication of the designed quad-robot. We validate the feasibility of designs generated with our system through physics simulations and with a physically-fabricated prototype.
@article{alderighi2021volume,
author = {Feng, Xudong and Liu, Jiafeng and Wang, Huamin and Yang, Yin and Bao, Hujun and Bickel, Bernd and Xu, Weiwei},
title = {Computational Design of Skinned Quad-Robots},
journal = {IEEE Transactions on Visualization and Computer Graphics},
number = {6},
volume = {27},
year = {2019},
publisher = {IEEE}
}
The authors would like to thank anonymous reviewers for their constructive comments. Weiwei Xu is partially supported by Zhejiang Lab. Yin Yang is partially spported by NSF under Grant Nos. CHS 1845024 and 1717972. Weiwei Xu and Hujun Bao are supported by Fundamental Research Funds for the Central Universities. This project has received funding from the European Research Council (ERC) under the European Unions Horizon 2020 research and innovation programme (Grant agreement No 715767).